







Increased activity in offshore petroleum exploration and both pipe and cable lay has led to the need for vessels with true dynamic positioning (DP) capability. This need is the product of both exploration in deeper offshore waters and the infrastructure congestion of mature undersea fields. Conventional mooring systems utilizing anchors and anchor handling vessels are not practical in shallow congested fields due to the danger of dragging across pipelines and cable. In deeper waters, the weight and difficulty of handling the necessary scope and rode renders the traditional four-point moor less cost effective and impractical. Vessels with true DP capability are more attractive for these projects.
Offshore vessels with dynamic positioning are difficult to charter, especially for short- term projects. Most large DP vessels are on long-term contract with options and command high day rates that make their employ for smaller, short-term projects economically nonviable. Existing vessels or barges, which would be ideal for the project, lack the sophisticated thruster, powering and positioning computer systems. Upgrade of conventional vessels and barges to DP capability is possible but impractical for several reasons. First, the contractor is reluctant to invest the capital outlay required for conversion, especially for a short-term, one-off project that is unlikely to be repeated. Second, the contractor is unlikely to invest capital until the contract is awarded. After the award, the time period to undertake the contract is more likely than not too short to allow a conventional vessel conversion to dynamic positioning. Lastly, the costs of a one-off project conversion make the contractor’s bid unattractive for the project. What is required is a portable dynamic positioning system that can be rapidly be mobilized on a vessel or barge of opportunity then demobilized after the project and stacked, transferred to another vessel or sold to another contractor.
To answer this need, Thrustmaster of Texas has developed a Portable Dynamic Positioning System (PDPS) for use on such vessels of opportunity. The system normally consists of modular, deck-mounted hydraulic outboard azimuthing thrusters with separate containerized diesel-hydraulic power units, a central DP computer console, interconnecting hydraulic hoses between thrusters and the power units, and electrical control cables between the power units and the DP console. Standard thruster sizes are 250, 500, 750, and 1,000 horsepower. Using multiple thrusters, systems ranging from 500 to 8,000 installed horsepower may be configured. Thrusters are usually installed on temporary sponson decks welded to the vessel’s hull plating. The entire system can be installed dockside, takes a minimum of deck space and does not require any permanent vessel modifications. The complete mobilization and sea trials can be completed within a few days, usually less than a week.
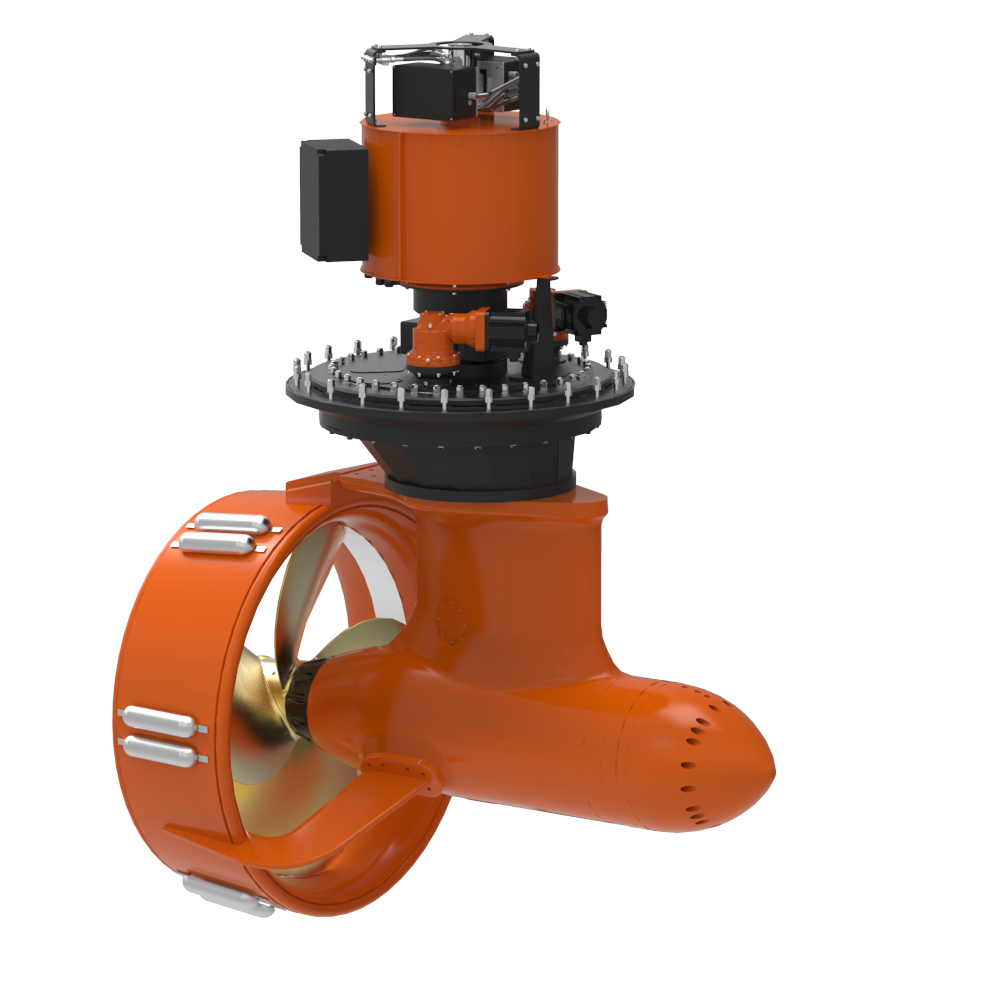
The thrusters use a hydraulic motor to directly drive the propeller, which is contained, in a high-thrust nozzle. The thruster stem contains no moving parts, making for an extremely simple and reliable thruster design. Because there are no mechanical shafts in the thruster stem, the stem length can be easily modified to accommodate different vessel depths. The thrusters steer 360 degrees endlessly without stops. Each of the thrusters are powered by their own containerized diesel-hydraulic power unit (HPU). Each HPU contains a suitably rated industrial, radiator- cooled engine, hydraulic power pack, hydraulic reservoir and oil cooler, diesel fuel day tank and local thruster control console. The HPU is fitted into an ISO-688 specially modified 20 foot container suitable for ocean freight. Mounting of the HPU is by any method suitable for securing cargo containers for sea.
Power transmission efficiency from diesel engine prime mover to propeller are typically 80 to 82 percent at full load. Unlike diesel-electric transmission systems where partial load efficiency decline, the partial load efficiency of the diesel-hydraulic system actually increases. This factor is especially important in DP applications where as the system usually requires about 20 percent of its nominal power about 80 percent of operational time. Control of thrust is proportional to the output of the hydrostatic pump, which is controlled by an electric swashplate controller commanded by the DP computer. Steering azimuth of each thruster is also controlled by the DP computer though an electrical feedback fitted to the thruster steering mechanism,
The portable DP computer is a compact joystick system specially designed for use with Thrustmaster’s hydraulically driven thrusters and which provides manual and automatic control of both position and heading. A complete sensor suite, including gyrocompass, differential GPS, and wind sensor can be provided. For DPS-1 systems, the sensors can be provided in duplicate. For manned diving or critical positioning applications, a DPS-2 type system can be furnished to provide dual redundancy of all components.
Numerous Thrustmaster PDPS systems are in service with pipe lay, cable lay, diving and salvage vessels. In a recent project, operational parameters required a 5-meter watch circle in Sea State 4 with a significant mean wave height of 6.2 feet and a mean sustained wind speed of 19 knots. With actual conditions slightly higher than specified, a hold position test resulted in a sustained 1 to 2 meter watch circle for five hours, including a thruster failure simulation on two thrusters. Performance results were satisfactory in every respect concerning the operational capabilities of the system.
