










Since their introduction in the early 1960’s, dynamic positioning systems continue to become more commonplace in the offshore industries. The first dynamic positioning systems were used exclusively for deep sea drilling applications. As these systems became more reliable and more affordable, they found their way into many other applications, including pipe laying, cable laying, offshore construction, supply boats, crane vessels, diving boats, salvage vessels, ROV support, offshore tanker loading, workover rigs and seismic vessels, to name a few. This paper discusses Thrustmaster’s portable dynamic positioning system, allowing vessels of opportunity or any floating structure to be easily retrofitted or temporarily equipped with dynamic positioning capability.
Introduction

A dynamic positioning system is a computer controlled propulsion system allowing a vessel to maintain its position in open waters against wind, waves and current. The system consists of computer controlled thrusters whereby the computer calculates and controls the amount and direction of thrust necessary to counteract wind, wave and current forces in order to prevent or correct deviation from the desired position and heading of the vessel. Position reference sensors, combined with wind sensors, current sensors and gyro compasses, provide information to the computer pertaining to the vessel’s position and the magnitude and direction of environmental forces affecting its position. The computer program contains a mathematical model of the vessel that includes information pertaining to the wind and current drag of the vessel and the location of the thrusters. This knowledge, combined with the sensor information, allows the computer to calculate the required steering angle and thruster output for each thruster.
Thrusters
A combination of fixed main propellers with tunnel thrusters is often used in applications where heading is unimportant to the mission of the vessel. This allows the DP system to point the bow towards the brunt of the environmental forces using the main propulsion to counteract those forces while the sideways holding force is controlled by the transverse tunnel thrusters. Quite often, a fixed heading without fish-tailing is required. The heading may be dictated by mission requirements, rather than weather conditions. For those applications, a system utilizing multiple azimuthing thrusters is much more appropriate. It allows the computer to not only control the magnitude of the thrust vectors, but also their angular direction. By doing so, the computer can utilize each thruster most effectively, permitting the designer to accurately define thruster capacity for a vessel operating in a defined sea state.
 The most common and most efficient thrusters used for dynamic positioning applications are azimuthing propeller thrusters using large diameter propellers in Kort nozzles. These thrusters typically develop 25 to 30 pounds of net bollard thrust per delivered horsepower. A comparison to jet thrusters, which produce only 11 to 14 pounds of thrust per horsepower, explains why jet thrusters are less practical for use in DP applications. Jet thrusters require more than twice the installed horsepower and use more than twice the fuel of equivalent propeller thrusters.
The most common and most efficient thrusters used for dynamic positioning applications are azimuthing propeller thrusters using large diameter propellers in Kort nozzles. These thrusters typically develop 25 to 30 pounds of net bollard thrust per delivered horsepower. A comparison to jet thrusters, which produce only 11 to 14 pounds of thrust per horsepower, explains why jet thrusters are less practical for use in DP applications. Jet thrusters require more than twice the installed horsepower and use more than twice the fuel of equivalent propeller thrusters.
Accurate control of thruster output is essential in DP applications. When using a fixed pitch propeller, thrust is controlled by controlling the propeller speed. The computer must be able to control propeller speed from zero RPM to full speed. Direct diesel engine drive through a fixed reduction is not suitable as the usable engine speed range does not cover slow operating RPM’s resulting in unstable control of the vessel. Many of the existing DP systems use DC electric motor driven propeller thrusters. The drive system includes diesel generators, SCR controllers and variable speed DC electric motors driving the propeller shaft through right angle gear transmissions. Overall transmission efficiency from diesel engine to propeller is typically in the range of 75 to 80 percent at full load and about 70 to 75 percent at half load. Variable frequency AC drive systems have similar characteristics.
Azimuthing thrusters using controllable pitch propellers are used on some high horsepower applications. Thrust output is controlled by pitch adjustment, so the thrusters do not require a variable speed drive system. While controllable pitch propellers provide acceptable reliability in large ship propulsion systems, incorporating the complex propeller pitch control system in azimuthing thrusters presents a serious challenge, as pitch controls and feedbacks have to go through complex slipring mechanisms to facilitate the 360° steering of the propeller. The system contains many hundreds of moving parts that have limited life and reliability when used in a demanding DP system requiring continuous pitch adjustments. While drive efficiency is high ( 90 to 95 percent), the large propeller hub and poor pitch distribution of the blades result in lower propeller efficiencies than those obtained with fixed pitch propellers.
Most thrusters used on DP systems are mounted through-the-hull in a well mounting configuration. Propeller and nozzle extend below the baseline of the vessel to ensure clean water to the propellers at any steering angle. Many installations use retractable thrusters allowing the vessel into shallow water ports without danger of running the thrusters aground.
Vessels of Opportunity

Some of the older offshore oil fields have become quite congested. The Gulf of Mexico along the Louisiana coastline is a good example. There are numerous platforms and sub-sea structures. A network of pipelines and cables cover the bottom like a spider web. There is always new construction, removal of old structures, repair or modification of existing structures or pipelines involving diving and ROV work. Mooring systems using anchors and winches become less practical as the area becomes more congested. Anchors tear up pipelines and cables. Moreover, the activity moves to deeper water where anchor mooring systems are no longer cost effective or practical. Dynamic positioning is the answer. However, DP vessels are still few and far between and have high day rates. Additionally, the available vessels with DP capability may not be suitable or optimum for the mission at hand. Vessels or barges that are just right for these missions could be retrofitted with a dynamic positioning system. But these upgrade conversions are very expensive and time consuming. Thruster installations require extensive hull modifications in dry dock. Adding generator sets and electric motor speed controls requires additional machinery space which may not be available.
A Portable Dynamic Positioning System

Thrustmaster of Texas has developed a portable dynamic positioning system consisting of modular, deck mounted, azimuthing thrusters with separate hydraulic power units and a DP control console. The whole system can be installed dockside, takes a minimum of deck space and does not require any permanent vessel modifications. Installation can be completed within days.
The system normally consists of four or more thrusters, four or more hydraulic power units, one (1) central DP console and the interconnecting hydraulic hoses between thrusters and power units, and electrical control cables between power units and console. Standard thruster sizes are 250 HP, 500 HP, 1000 HP, 1500 HP and 2000 HP. Using multiple units, systems ranging from 500 HP (2 x 250 horsepower) up to 24,000 horsepower (12 x 2000 horsepower) can be configured.
Portable Thrusters
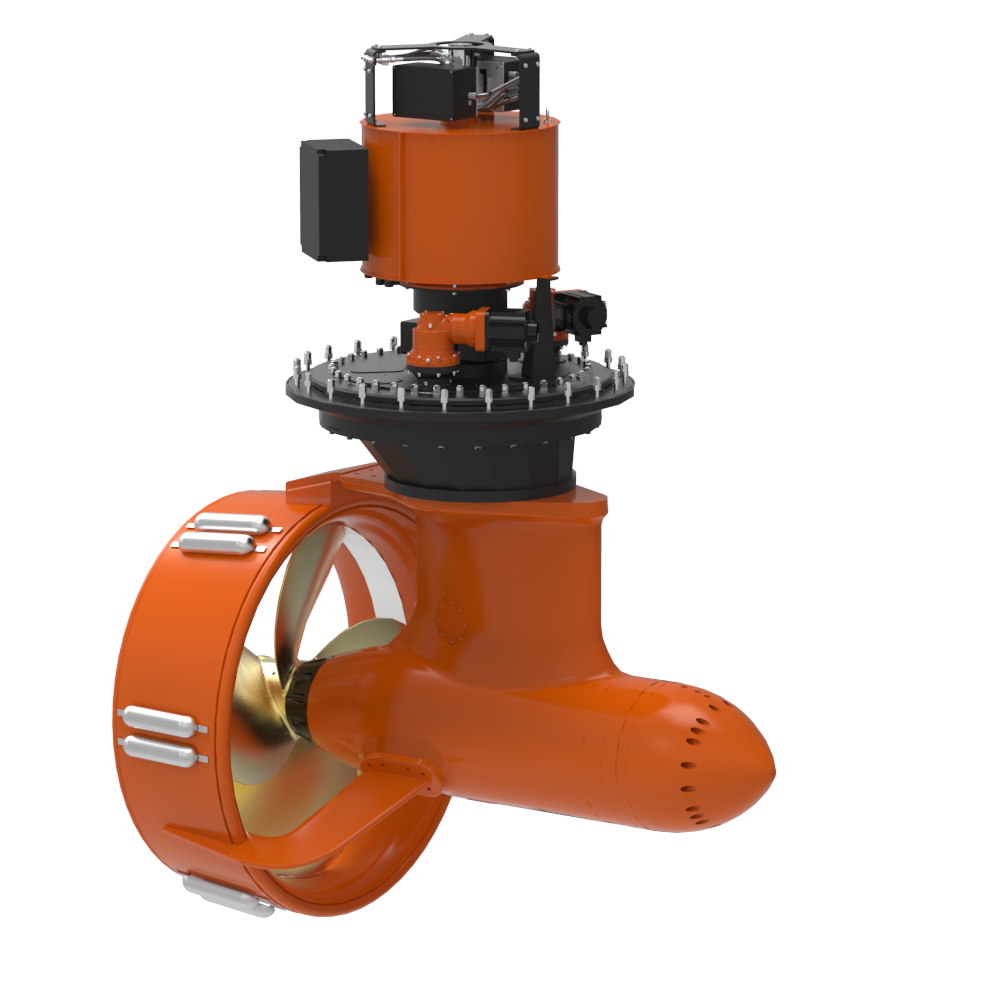
The portable thrusters are mounted on deck using a minimum amount of deck space. They use direct hydraulic drive to the propeller. The variable speed hydrostatic drive motor is in the lower foot of the thruster directly in line with the propeller shaft. This direct hydraulic drive eliminates the need for right angle gear transmissions and drive shafts used on other thrusters. Hydraulic hoses run from the deck mounted upper thruster assembly down to the propulsion motor in the lower foot of the thruster. The thruster stem contains these hydraulic hoses. There are no moving parts in the thruster stem, other than the hydraulic fluid running through these hoses. This makes for an extremely simple and reliable thruster design. It allows mounting on deck without intermediate stem support. The upper structure is designed to handle the omni-directional cantilever moment from the thruster in much the same way as a deck crane handles the cantilever moment of its load. The stem length can easily be adapted to accommodate different vessel depths.
The closed loop hydraulic drive of the propeller is highly efficient. Transmission efficiency from diesel engine to propeller is typically 80 to 82 percent at full load. It even increases at partial load. Half-load transmission efficiency is typically 82 to 85 percent. Since DP systems run at partial load most of the time, the partial load efficiency is of particular importance.
The hydraulic system acts as a vibration dampener. Propeller induced vibrations and engine induced vibrations are dampened by the hydraulic system and isolated from one another. There are no torsional or lateral critical speeds within the operating range of the equipment. The drive is extremely smooth.
Propeller speed is infinitely controlled through control of pump displacement. The DP computer accurately controls thruster output by comparing its electrical output signal to the pressure feedback signal from the hydraulic drive. Hydraulic pressure is directly proportional to propeller torque, so the feedback accurately represents delivered thrust, unlike speed feedbacks used on most older systems.
Hydraulic systems are extremely reliable, provided they are properly designed and the hydraulic fluid stays clean and cool. An appropriately sized heat exchanger on the power unit keeps the fluid cool while charge filters, return filters, and flushing filters keep the fluid at a high level of cleanliness. Pressurized breathers virtually eliminate air ingestion to keep the moisture out of the system.
Portable Hydraulic Power Units
Each thruster is powered by its own hydraulic power unit. These power units are enclosed marine type hydrostatic transmission units using a radiator cooled Caterpillar diesel engine as prime mover. Some of these units use a standard 20 foot or 40 foot ISO container as enclosure. They may be installed at any location based on deck space availability or optimum weight distribution. The units are complete with fuel day tank, independent battery powered electric start and control system with automatic alarms and shutdown and are provided with critical grade muffler and noise attenuating equipment. These power packs produce the hydraulic power for the propeller drive system as well as hydraulics for steering and auxiliary functions. This hydraulic power is provided to the thruster through hydraulic hoses that run on deck from the power unit to the thruster.
Portable Control Console
The systems use a Kongsberg or equivalent DP computer system designed specifically for use with Thrustmaster’s hydraulically driven azimuthing thrusters. It is installed in a portable control console for indoor installation on the bridge. Optionally, Thrustmaster can provide a complete integrated control van with DP System, manual controls, gyros, wind sensors, DGPS antenna, etc. all installed and pre-wired. The display provides a centralized report to the operator of all aspects of vessel control. Thruster activity is reported in animated form as are heading and position control activity and all incoming sensor data. Selector keys are provided for DP or travel mode, screen select and alarm acknowledgment. Joystick controls on the console allow independent manual control of vessel heading and position.
The control panel houses the control computers and signal processor units and the interface electronics that connect to the thrusters and vessel sensors.
The DP computer program features sensor interface software and a vessel mathematical model which is custom configured for each installation by user definable parameters. The parameters define vessel characteristics such as dimensions, displacement, thruster locations, etc., and the type of position reference systems and vessel sensors that are connected to the system, such as DGPS, hydro-acoustic, laser, radio ranging, wind and gyro. The sensor suite can be supplied by Thrustmaster or the customer’s own sensors can be used.
Installation and Startup
A Thrustmaster representative is required during mobilization and demobilization of the system. This representative uses a laptop computer for program fine tuning, troubleshooting and performance analysis. At initial startup, main line hydraulic filters are temporarily installed in conjunction with a portable particle counter for on-line sampling of the hydraulic fluid. The particle counter prints a fluid analysis every five minutes complete with ISO and NAS cleanliness levels. The temporary flushing filters are not removed until a cleanliness level of ISO 15/12 (NAS Class 6) is obtained. This is better than aircraft quality. A number of equipment manufacturers, including SKF, have found through endurance testing that life of rotating machinery with small clearances, like ball bearings and piston pumps, is dramatically increased when lubrication filtration levels are increased. Cleanliness of hydraulic fluid is by far the most important factor affecting life and reliability of a hydraulic system. There are many documented cases where hydrostatic transmissions exceeded 100,000 operating hours without interruption.
Redundancy
Depending on application requirements, additional thruster units and a duplicate DP computer may be required to provide the necessary redundancy. It is the user’s responsibility to clearly define redundancy requirements of the DP system.
Classification Society certification by ABS or DNV is available up to DPS-3.

One thought on “Portable Dynamic Positioning Systems (PDPS) White Paper”
Comments are closed.